Controlling linear and rotary motions of an object 4 thang010146 0:17 7 years ago 27 594 Скачать Далее
29.Controlling linear and rotary motions of an object 4 - Mechanisms.mp4 Interesting Things 0:17 7 years ago 35 Скачать Далее
Controlling linear and rotary motions of an object 3 thang010146 0:31 7 years ago 62 709 Скачать Далее
Controlling linear and rotary motions of an object 2 thang010146 0:27 7 years ago 151 324 Скачать Далее
Controlling linear and rotary motions of an object 1 thang010146 0:31 8 years ago 246 663 Скачать Далее
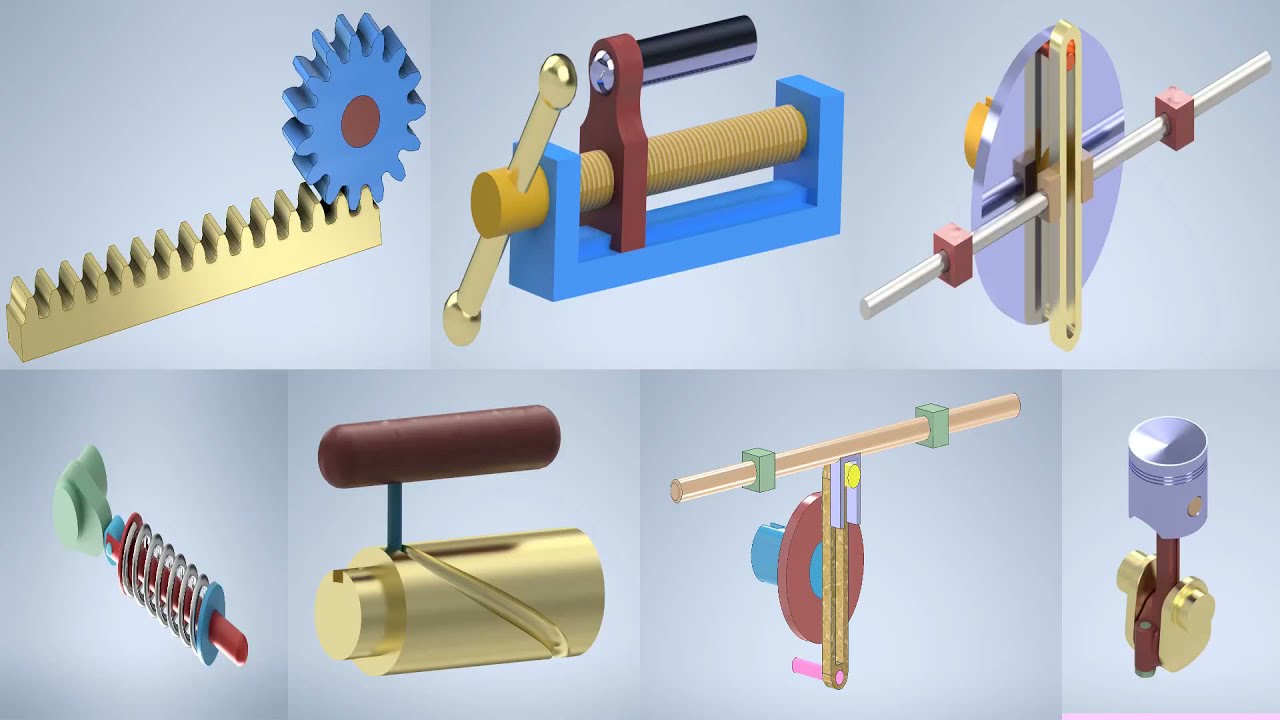
Mechanisms for converting Rotational Motion into Linear ميكانزمات لتحويل الحركة الدورانية لخطية Mechanical Design Masters 5:15 2 years ago 789 096 Скачать Далее
Linear and Rotary Motion in one actuator - www.intellidrives.com IntelLiDrives 1:13 5 years ago 20 666 Скачать Далее